Smart ‘Joey’ bots could soon swarm underground to clean and inspect our pipes
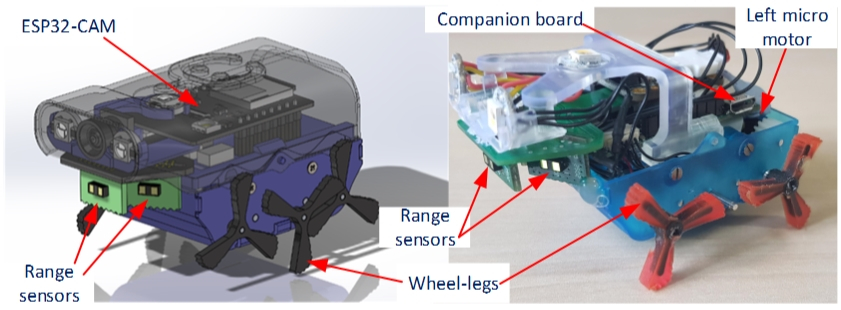
Joey’s design. Image credit: TL Nguyen, A Blight, A Pickering, A Barber, GH Jackson-Mills, JH Boyle, R Richardson, M Dogar, N Cohen By Mischa Dijkstra, Frontiers science writer Researchers from the University of Leeds have developed the first mini-robot, called Joey, that can find its own way independently through networks of narrow pipes underground, to …
Smart ‘Joey’ bots could soon swarm underground to clean and inspect our pipes Read More »