Integrated Task and Motion Planning (TAMP) in robotics
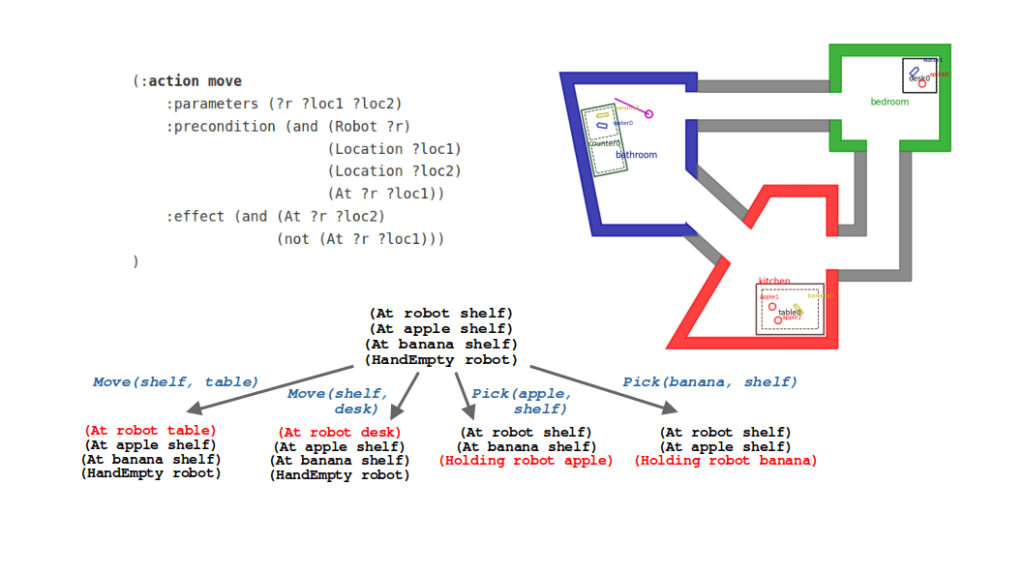
In the previous post, we introduced task planning in robotics. This field broadly involves a set of planning techniques that are domain-independent: That is, we can design a domain which describes the world at some (typically high) level of abstraction, using some modeling language like PDDL. However, the planning algorithms themselves can be applied to …
Integrated Task and Motion Planning (TAMP) in robotics Read More »