Unconventional Space Robots
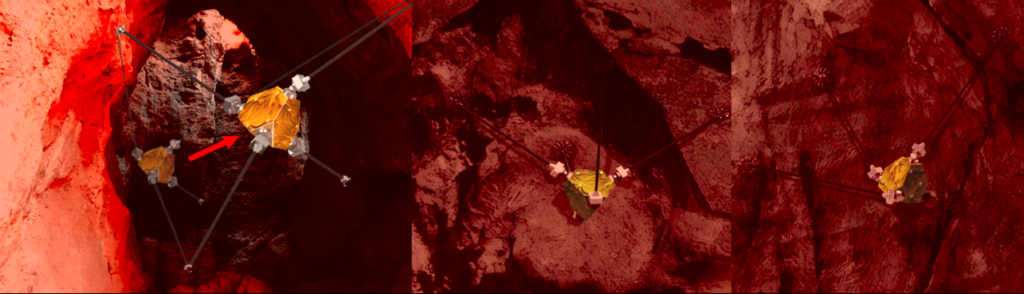
Credits: Marco Pavone Lilly interviews Stephanie Schneider, a PhD candidate at Stanford working on unconventional space robotics. Schneider explains her work on Reachbot, a long-reach crawling and anchoring robot, which repurposes extendable booms for mobile manipulation. They discuss the challenges and exciting elements of robotic prototyping for low-gravity or otherwise unique environments. https://youtu.be/0RqFgOHqz7E Stephanie …